ポイント クラスターの検索
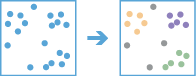
[ポイント クラスターの検索 (Find Point Clusters)] ツールは、空間分布に基づき周辺ノイズ内でポイント フィーチャのクラスターを検索します。
ある非政府組織が、害虫によって運ばれる特定の病気を調査しています。分析範囲内の世帯を表すポイント データセットがあり、それらの世帯の一部は感染しており、一部は感染していません。アナリストは、 [ポイント クラスターの検索 (Find Point Clusters)] ツールを使用することによって、感染した世帯のクラスターを決定し、害虫の処理および駆除を開始する必要のあるエリアを正確に示すことができます。
クラスターの検索対象となるレイヤーを選択します。
クラスターが検出されるポイント レイヤー。レイヤーは投影空間参照であるか、または [分析環境] を使用して、処理中の空間参照を投影座標系に設定する必要があります。
マップからレイヤーを選択できるだけでなく、ドロップダウン リストの下部にある [レイヤーの参照] を選択し、ビッグ データ ファイル共有データセットまたはフィーチャ レイヤーのコンテンツを参照して選択することもできます。
クラスターと見なす最小ポイント数
クラスターを形成するフィーチャの最小数。
検索範囲を設定
フィーチャを同じクラスターの一部と見なす最大距離。
結果レイヤー名
[マイ コンテンツ] で作成され、マップに追加されるレイヤーの名前。デフォルトの名前は、ツール名と入力レイヤー名に基づいて設定されます。レイヤーがすでに存在する場合、このツールは正常に実行されません。
[出力の保存場所] ドロップダウン ボックスを使用して、結果を保存する [マイ コンテンツ] 内のフォルダーの名前を指定できます。