Buscar clústeres de puntos
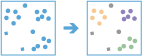
Esta herramienta encuentra clústeres de entidades de punto dentro del ruido colindante en función de su distribución espacial.
Si se ha activado la opción Usar la extensión del mapa actual, solo se analizará la capa de puntos de entrada que esté dentro de la extensión de mapa actual. Si la opción está desactivada, se analizarán todas las entidades de la capa de puntos de entrada, aunque estén fuera de la extensión de mapa actual.
Elegir la capa cuyos clústeres se buscarán
La capa de puntos en las que se buscarán los clústeres.
Número mínimo de puntos que se deben considerar como un clúster
El número mínimo de entidades para que se considere un clúster. Todo clúster con un número de entidades menor que el indicado se considerará ruido.
Limitar el rango de búsqueda a (opcional)
La distancia máxima dentro de la cual se considera que las entidades forman parte del mismo clúster. Si se deja en blanco, la distancia predeterminada utilizada será la distancia de núcleo más alta encontrada en el dataset y se excluyen aquellas distancias de núcleo que se encuentren dentro del 1% superior (excluidas las distancias de núcleo más extremas).
Nombre de capa de resultados
Este es el nombre de la capa que se creará en Mi contenido y se agregará al mapa. El nombre predeterminado se basa en el nombre de la herramienta y el nombre de la capa de entrada. Si la capa ya existe, se le pedirá que indique otro nombre.
En el cuadro desplegable Guardar el resultado en, puedes especificar el nombre de una carpeta de Mi contenido en la que se guardará el resultado.