Find Point Clusters
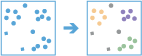
This tool finds clusters of point features within surrounding noise based on their spatial distribution.
If Use current map extent is checked, only the features in the input point layer within the current map extent will be analyzed. If unchecked, all features in the input point layer will be analyzed, even if they are outside the current map extent.
Choose the layer for which clusters will be found
The point layer where the clusters will be found.
Minimum number of points to be considered a cluster
The minimum number of features to be considered a cluster. Any cluster with fewer features than the provided will be considered noise.
Limit the search range to (optional)
The maximum distance to consider features to be part of the same cluster. If left blank, the default distance used will be the highest core distance found in the dataset, excluding those core distances in the top 1% (excluding the most extreme core distances).
Result layer name
This is the name of the layer that will be created in My Content and added to the map. The default name is based on the tool name and the input layer name. If the layer already exists, you will be asked to provide another name.
Using the Save result in drop-down box, you can specify the name of a folder in My Content where the result will be saved.